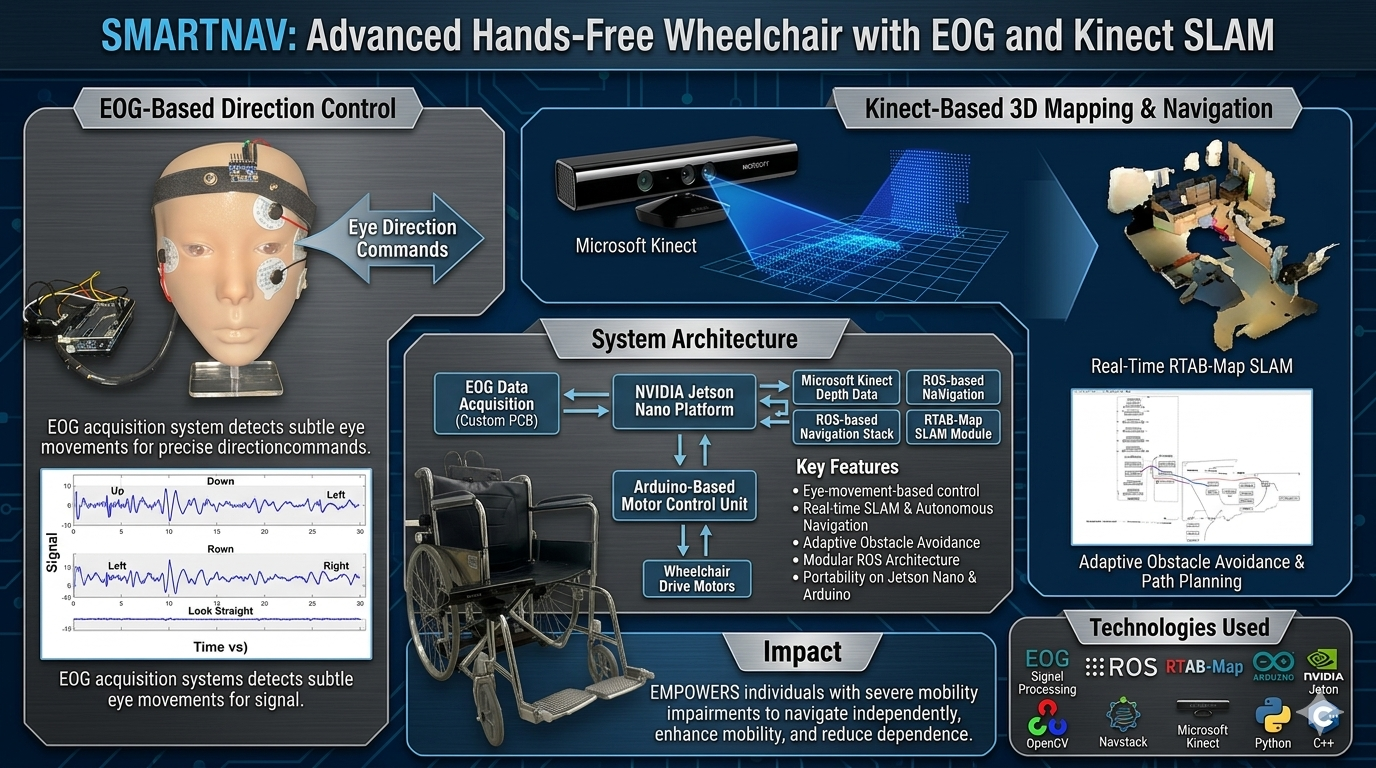

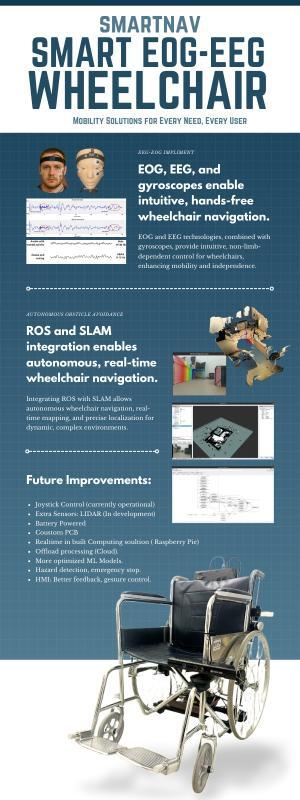


SMARTNAV
Autonomous Wheelchair System
Self-funded final year project. LiDAR combined with a depth camera drives SLAM-based hospital navigation - the chair maps, localises, and reroutes in real time around obstacles. Eye-movement control via EOG signal processing means the user only has to look where they want to go. Built on ROS2 on a Jetson Nano. Exhibited at the Sahasak Nimavum National Engineering Exhibition 2025.
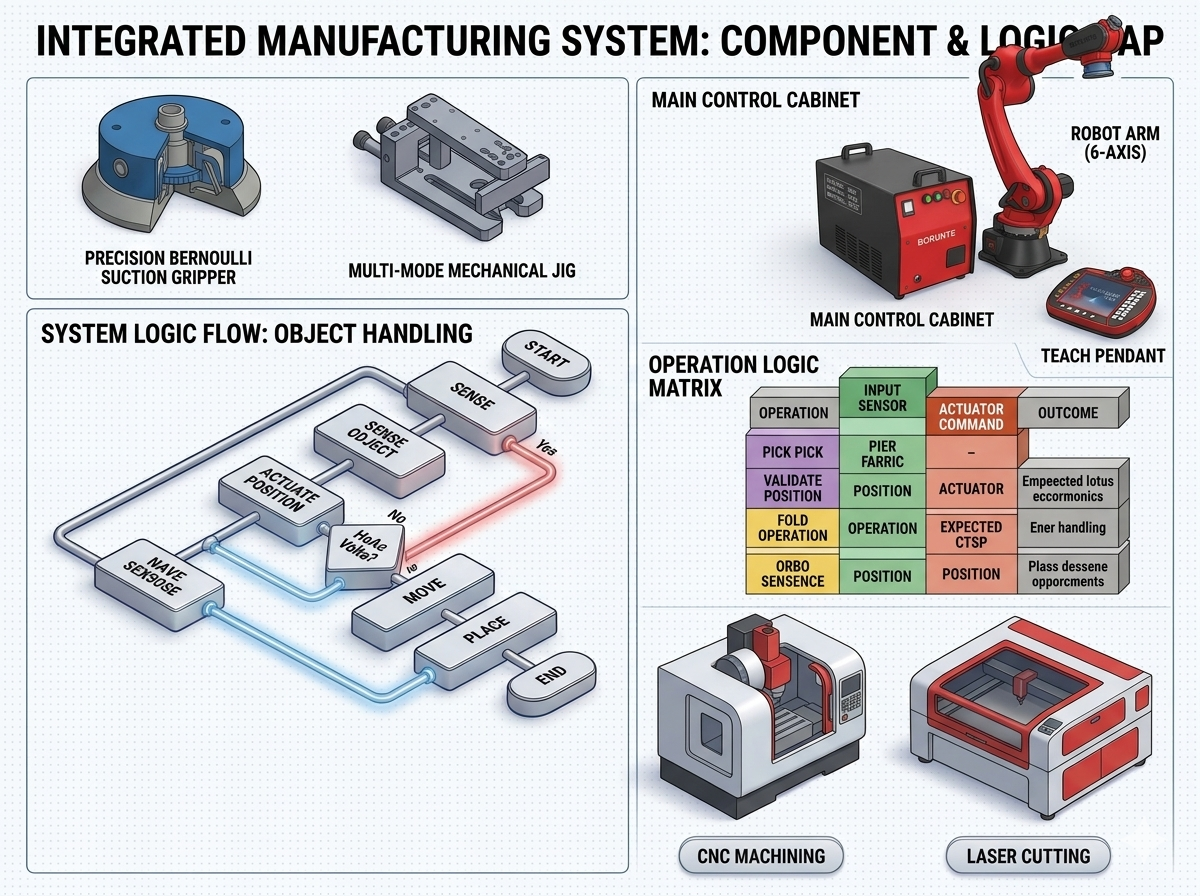
Industrial Robot Arm
Automation System
Multi-axis robot arm deployed and running on an active production floor. The scope covered end-to-end: motion planning, closed-loop sensor integration, suction-based end effector design including Bernoulli-style prototypes, and PLC synchronisation across the full production line. Mechanical components machined via CNC; CAD iterated across multiple revision cycles in SolidWorks and Onshape. Under NDA - specific application and client details not disclosed.
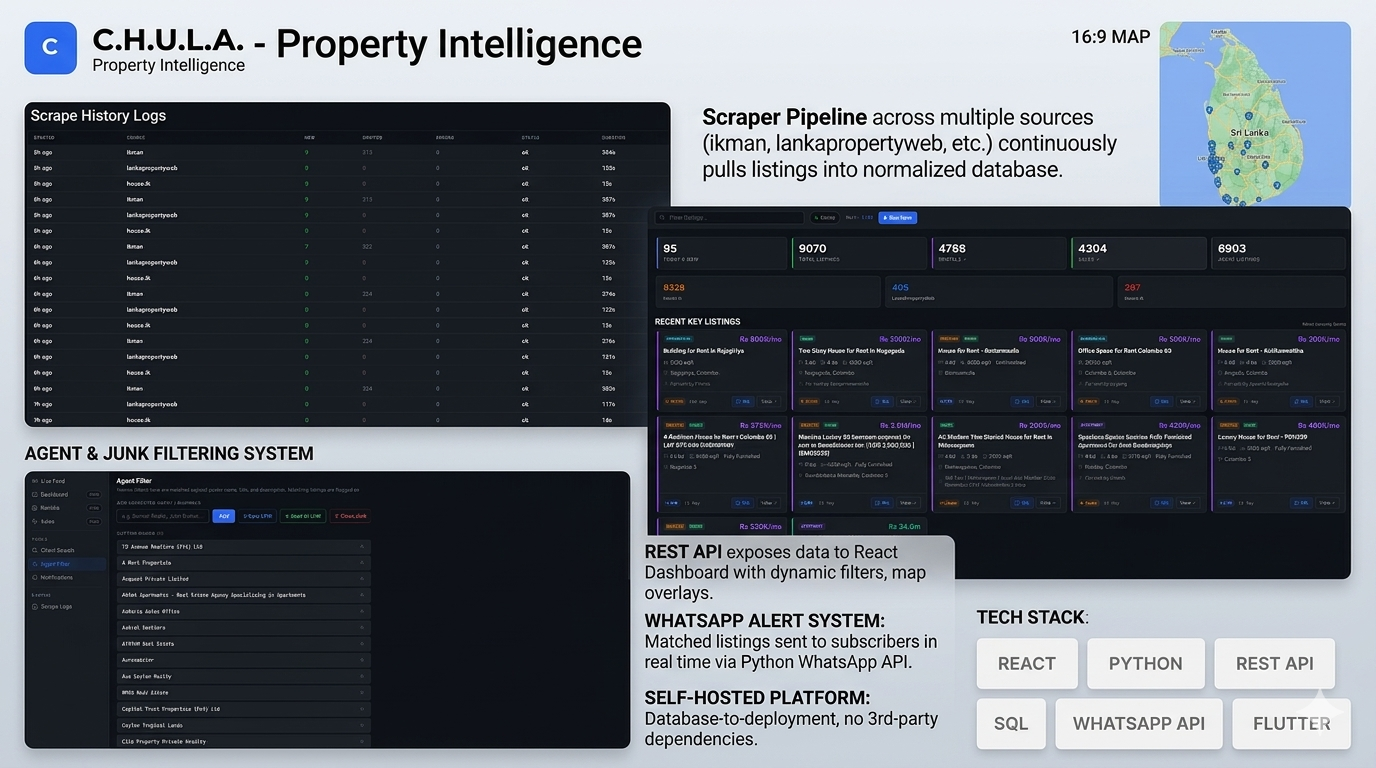
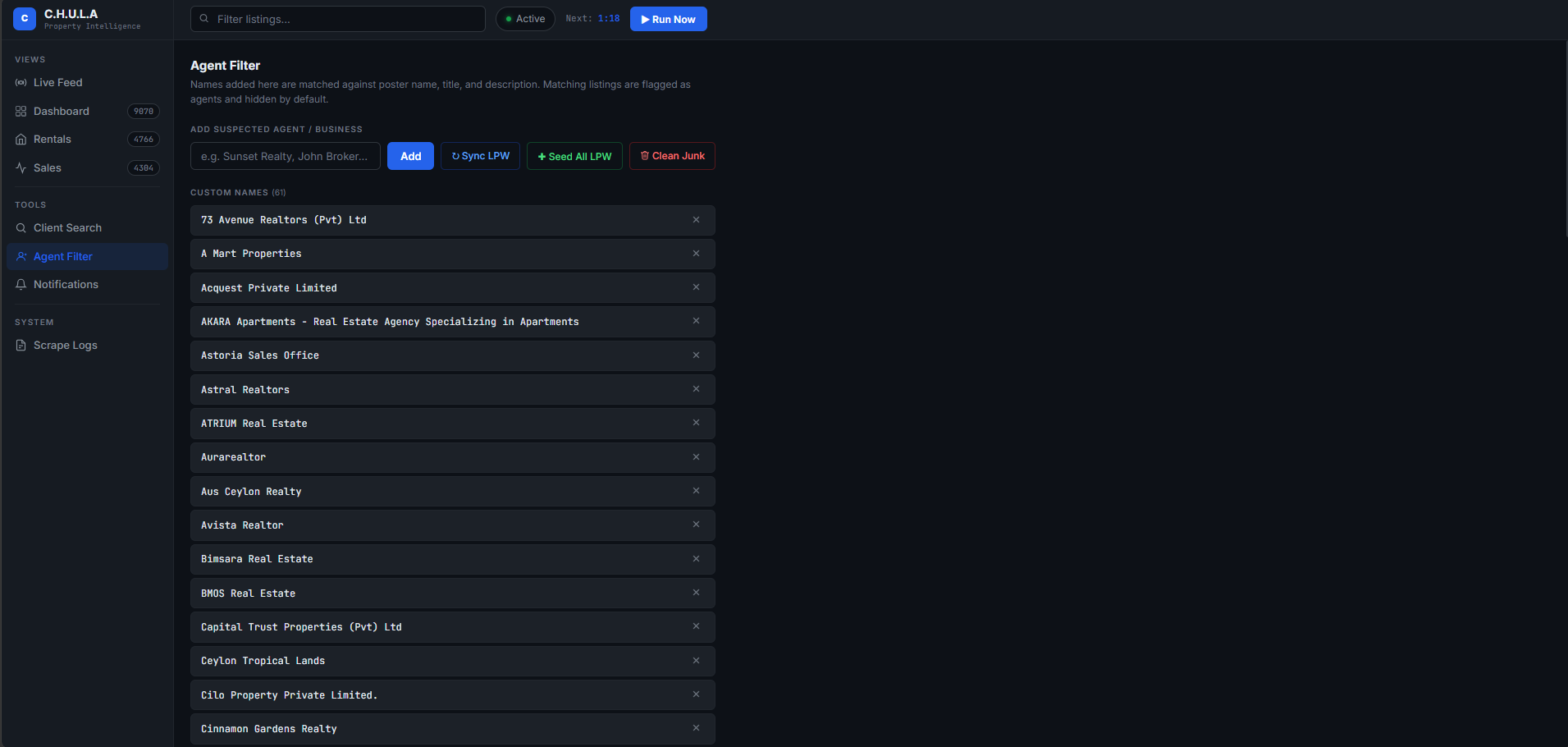
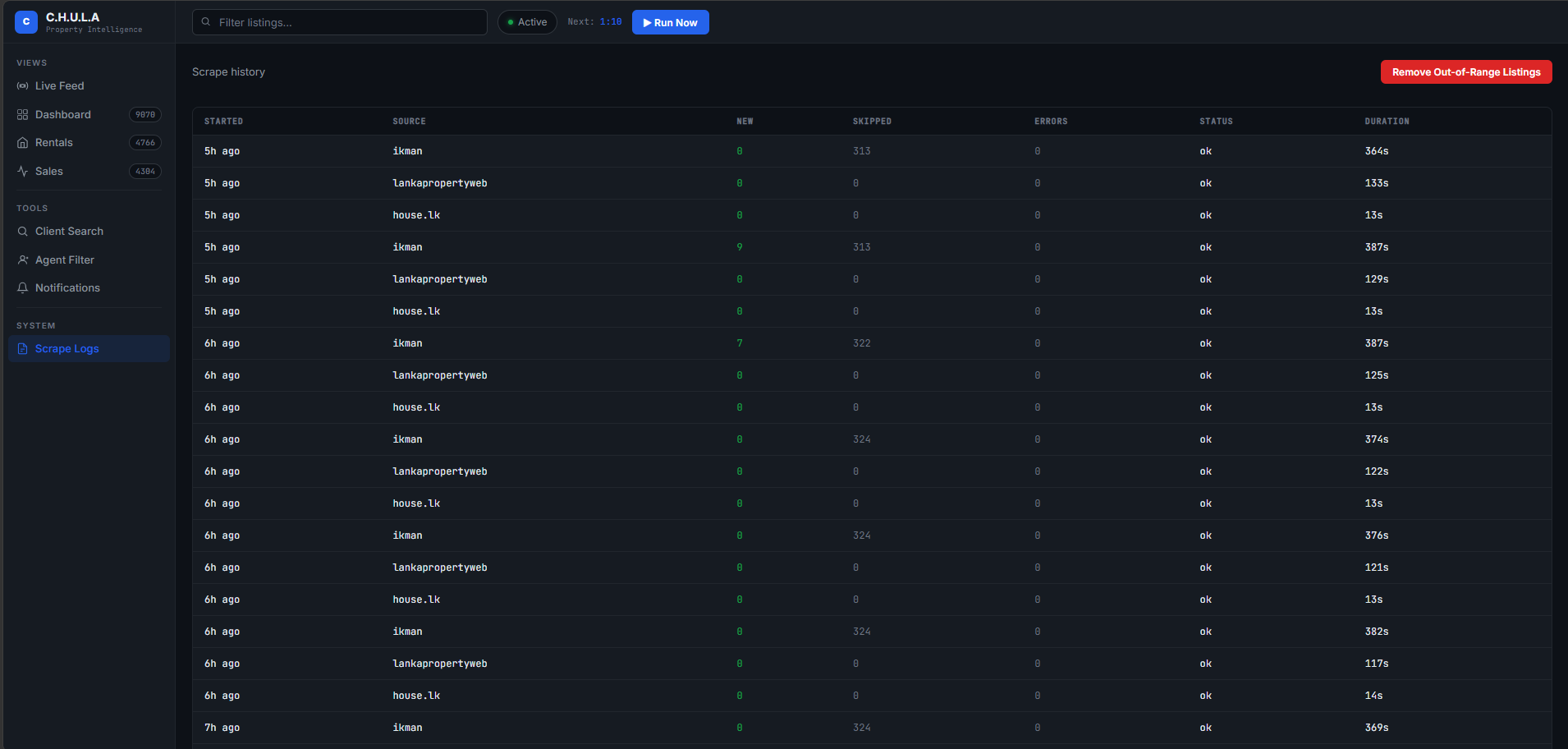
Property Intelligence
System Sri Lanka
Automated property listing intelligence platform built and running live against real Sri Lankan market data. A scraper pipeline continuously pulls listings across multiple sources into a normalised database. REST API backend exposes the data to a React dashboard with dynamic filters, map overlays, and comparison views. WhatsApp alert system fires matched listings to subscribers in real time. Fully self-hosted, database to deployment - no third-party platforms.
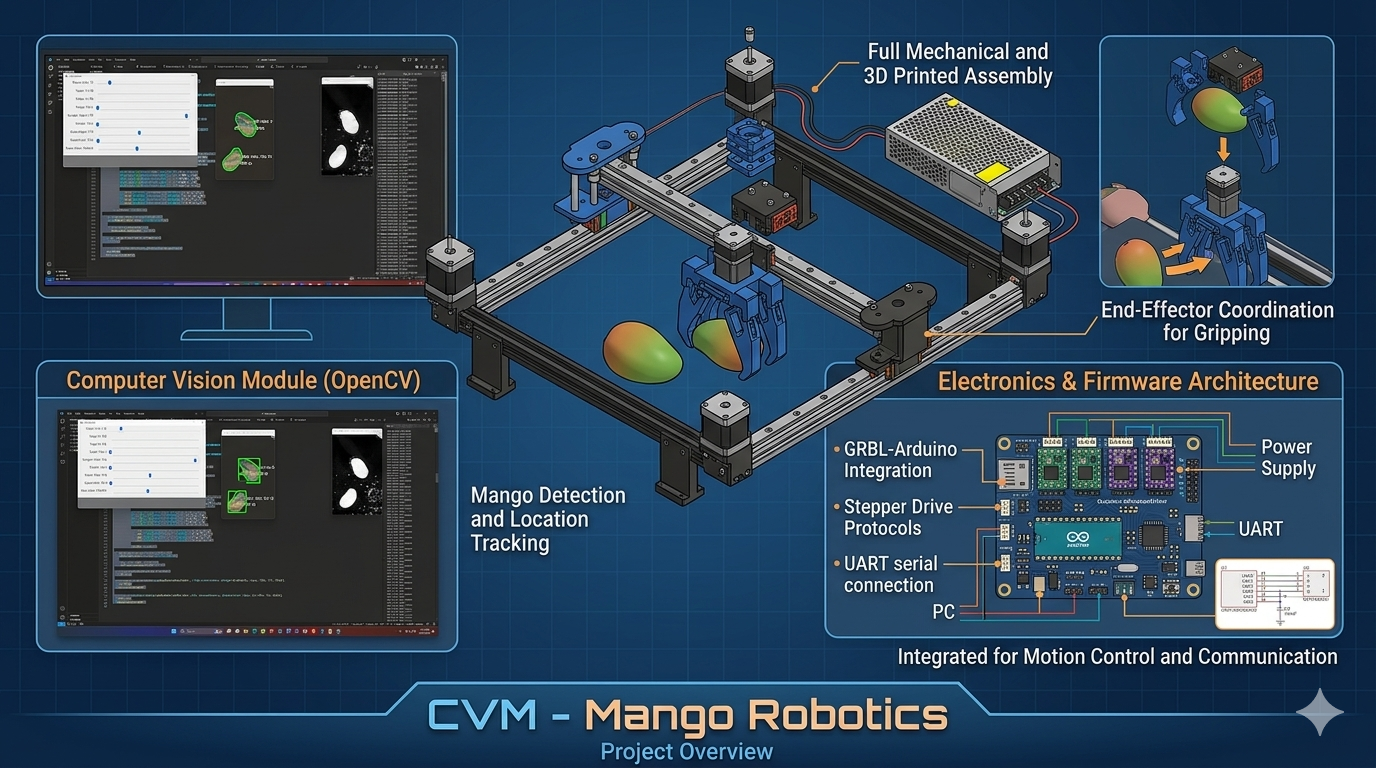
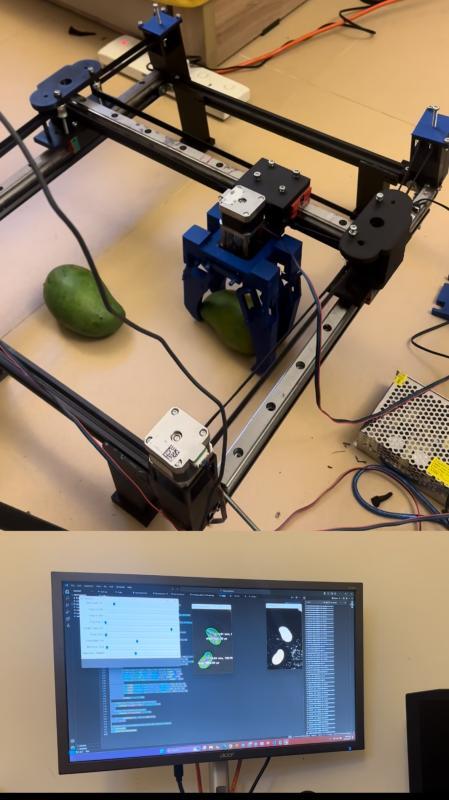
Autonomous Mango
Soft Gripper System
Vision-guided soft gripper built for agricultural automation in mango orchards. OpenCV pipeline handles fruit detection, localisation, and depth estimation from a single camera. GRBL controls XYZ positioning; an Arduino drives pneumatic actuation through a custom soft gripper end-effector. The gripper geometry was designed specifically to conform around irregular fruit shapes without surface damage - a constraint that ruled out rigid approaches entirely.
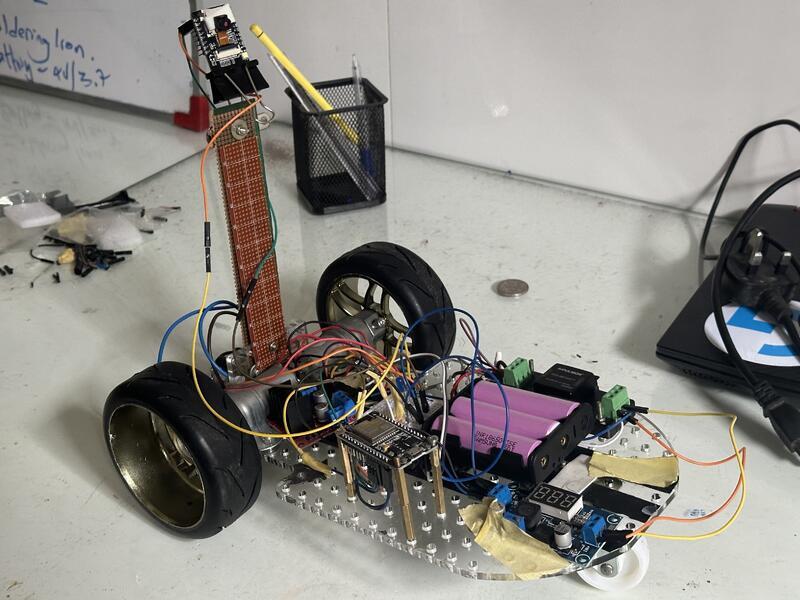
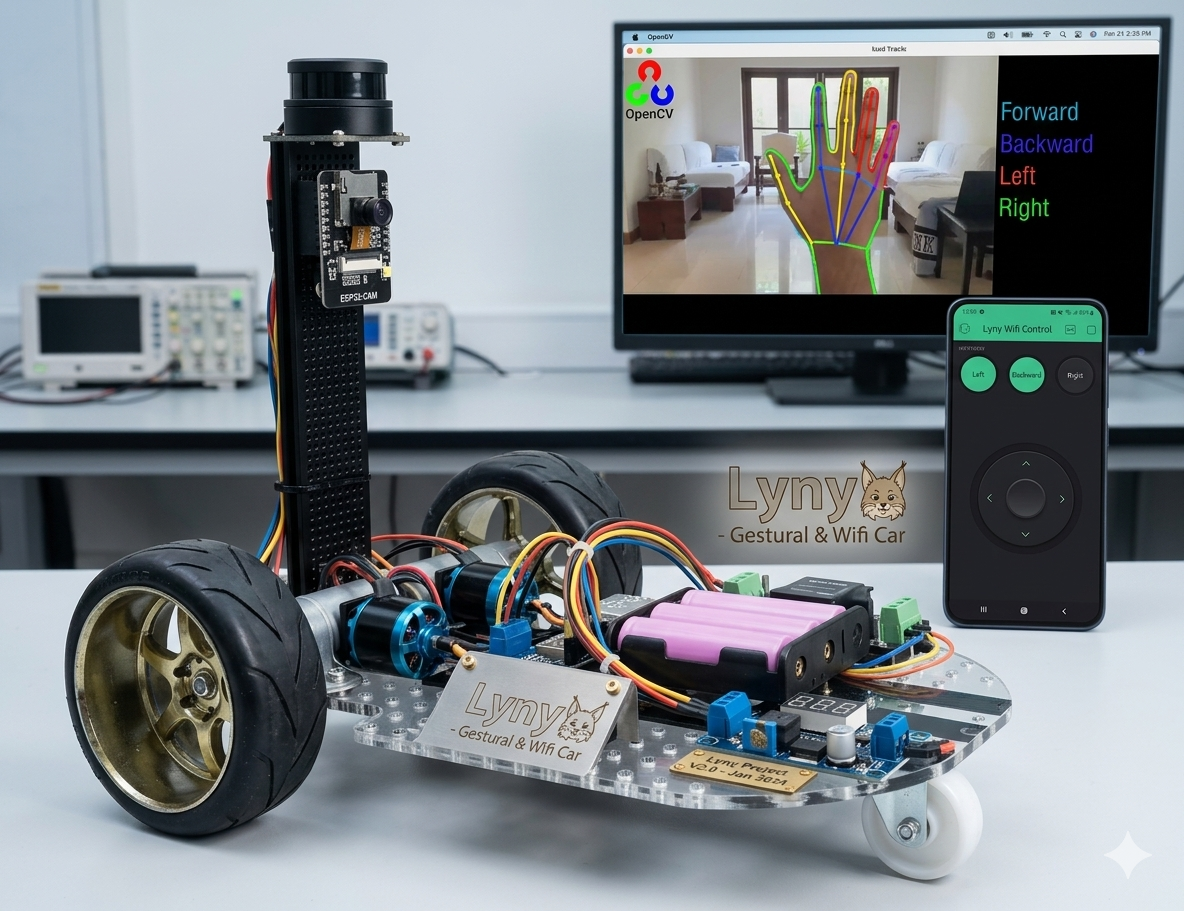
Lyny v2.1
Hand Gesture Controlled Robot Car
ESP32-based WiFi-teleoperated robot car with real-time hand gesture recognition. Gesture classification runs on a host machine via OpenCV - detecting and interpreting hand pose from a webcam - and streams directional commands over WebSocket to the onboard firmware. Designed around a low-latency control loop with concurrent video feedback. Custom PCB, 3D-printed chassis, and full firmware from scratch. Personal project, built end to end.

H-BOT XY Motion System
ClearCore Firmware & Precision Control
Developed firmware for a high-dynamic H-BOT XY positioning system for an industry client, using a ClearCore logic board. Motion is parameterised through X, Y, F (feed rate), and A (acceleration) values — X axis range 1700 to -1300, Y axis 4300 to -4300. Precision was critical: small coordinate adjustments with verified sequencing and recommended delays between moves to prevent mechanical overshoot. Wrote and tuned the ClearCore firmware from scratch, iterating through code inspection and parameter refinement until reliable repeatable positioning was achieved on the production line.

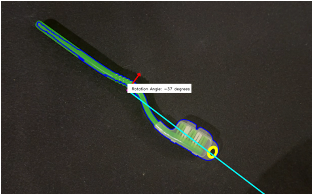
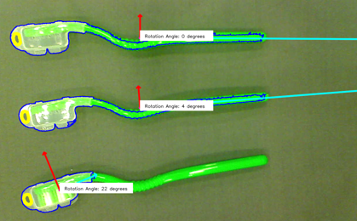

Delta Robot Vision
OpenCV Conveyor Object Detector
Full OpenCV vision pipeline for detecting toothbrushes on a moving conveyor and feeding position + orientation data to a delta robot for pick-and-place. Grayscale processing with contour detection isolates each item; principal component analysis extracts centroid coordinates and rotation angle per object. Template matching on the detected head region corrects angle polarity when the brush flips orientation. A pixel-to-millimetre calibration model — automated using a known-length reference object — converts all screen coordinates into robot workspace coordinates. End result: the delta robot receives precise X, Y, angle for every item on the belt in real time.
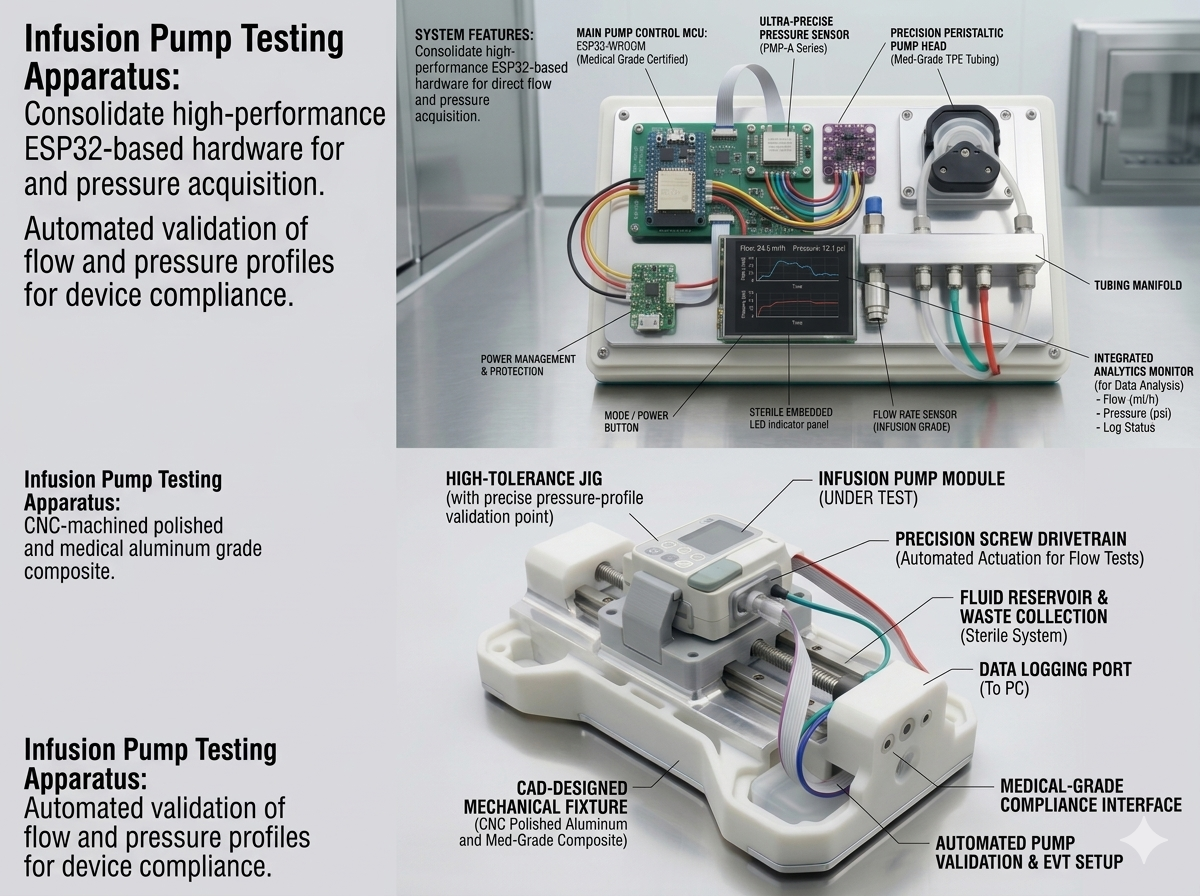
Medical Grade
Consumer Device Testing Jig Apparatus
Custom testing jig apparatus built to medical-grade tolerances for a New York-based health-tech company. The system automates pressure-profile validation and EVT testing cycles on consumer wearable devices, replacing manual bench testing with a repeatable, data-logged workflow. ESP32-based hardware handles real-time sensor acquisition and serial data logging; mechanical housing designed in CAD and 3D-printed for rapid iteration. Contributed to compliance documentation and defined pressure-profile requirements from physical testing data.


Crazy Machine
FPGA-Arduino Interactive Mechanical Display
A circus-themed interactive machine built from recycled components — servo gate, Ferris wheel, magnetic elevator, and entrance ramp all choreographed together. The core engineering challenge was synchronised Arduino-FPGA SPI communication: Verilog state machines on the FPGA handled timing-critical sequences while Arduino managed higher-level control logic. Sensor accuracy across multiple subsystems required careful debouncing and calibration. Final result is a fully autonomous sequence that runs start-to-finish without intervention.

Dual-DAC Line-Following Robot
NE555 Comparator, Bang-Bang Control + GUI
Line-following robot built from first principles — dual DAC generates a linear ramp signal that feeds into NE555 comparators for optical sensor thresholding, driving push-pull transistor motor stages directly. Bang-bang closed-loop control implemented in Arduino firmware adapts to varying track conditions in real time. Paired with a custom Python GUI for live sensor monitoring and parameter tuning without reflashing. Explored control algorithm refinement, sensor power optimisation, and circuit design across the full hardware-firmware-software stack.
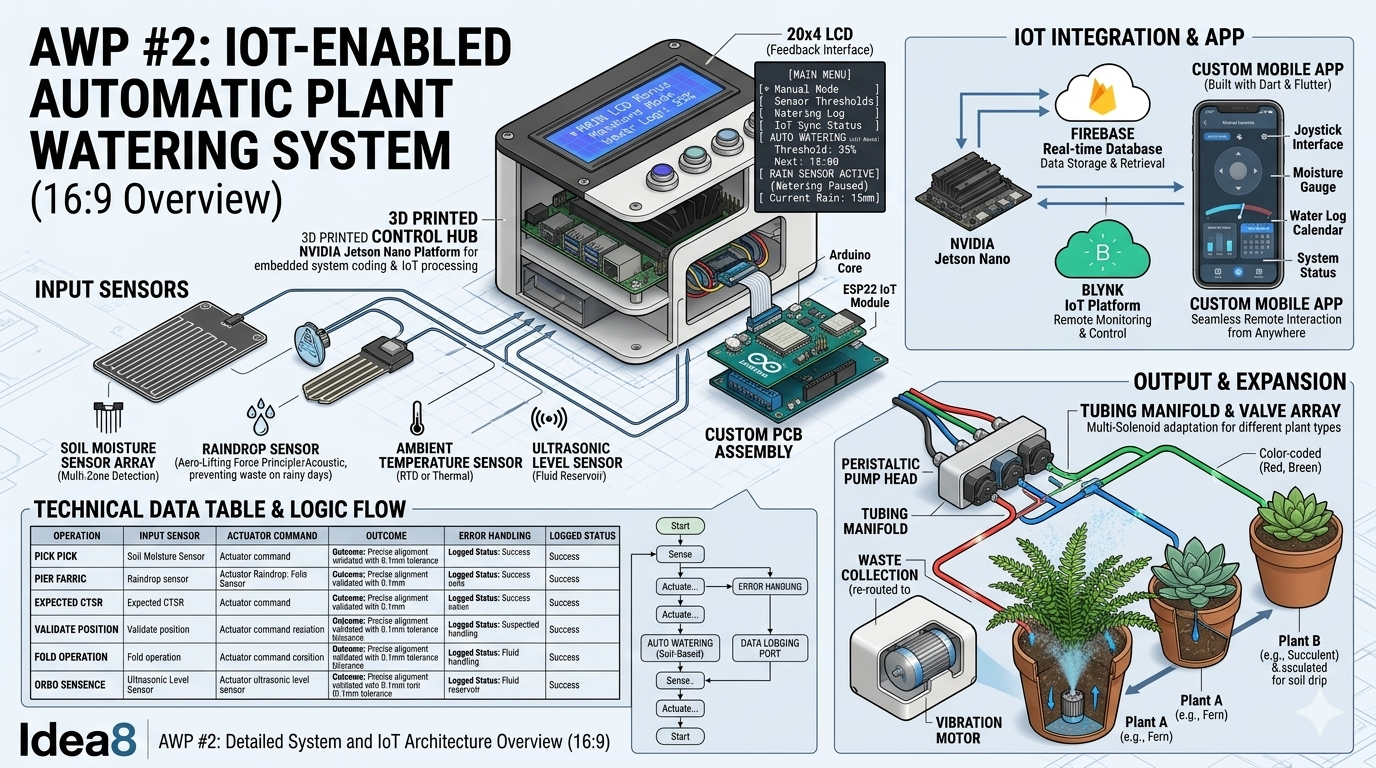
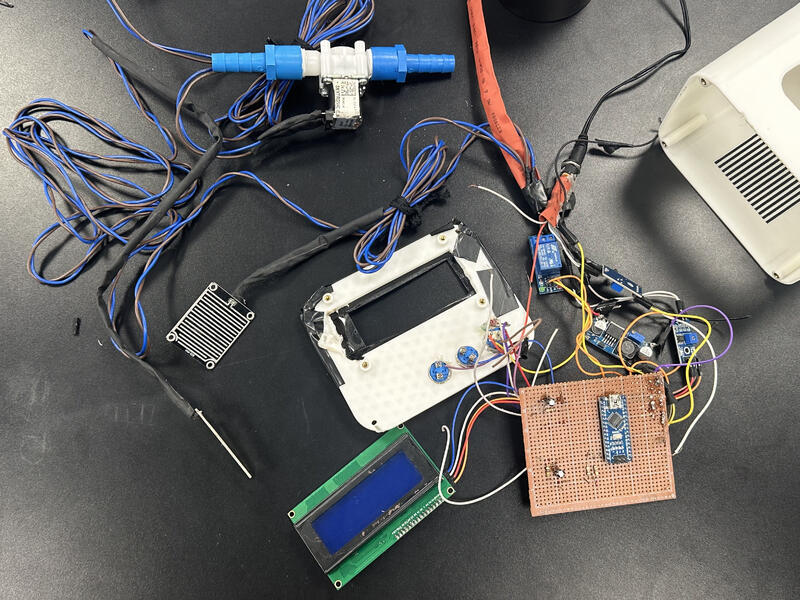

Automatic Plant Watering System
IoT, Firebase + Flutter Mobile App
End-to-end IoT system for automated plant care — soil moisture and raindrop sensors drive solenoid valves through a custom 3D-printed control box housing a 20x4 LCD. Three operating modes: manual trigger, time-interval scheduling, or sensor-threshold automation. Backend on Firebase for real-time data storage; Blynk for remote control. Flutter mobile app built in Dart gives full visibility and control from anywhere. Rain detection prevents unnecessary watering on wet days. Multiple solenoid lines configurable for different plant zones.
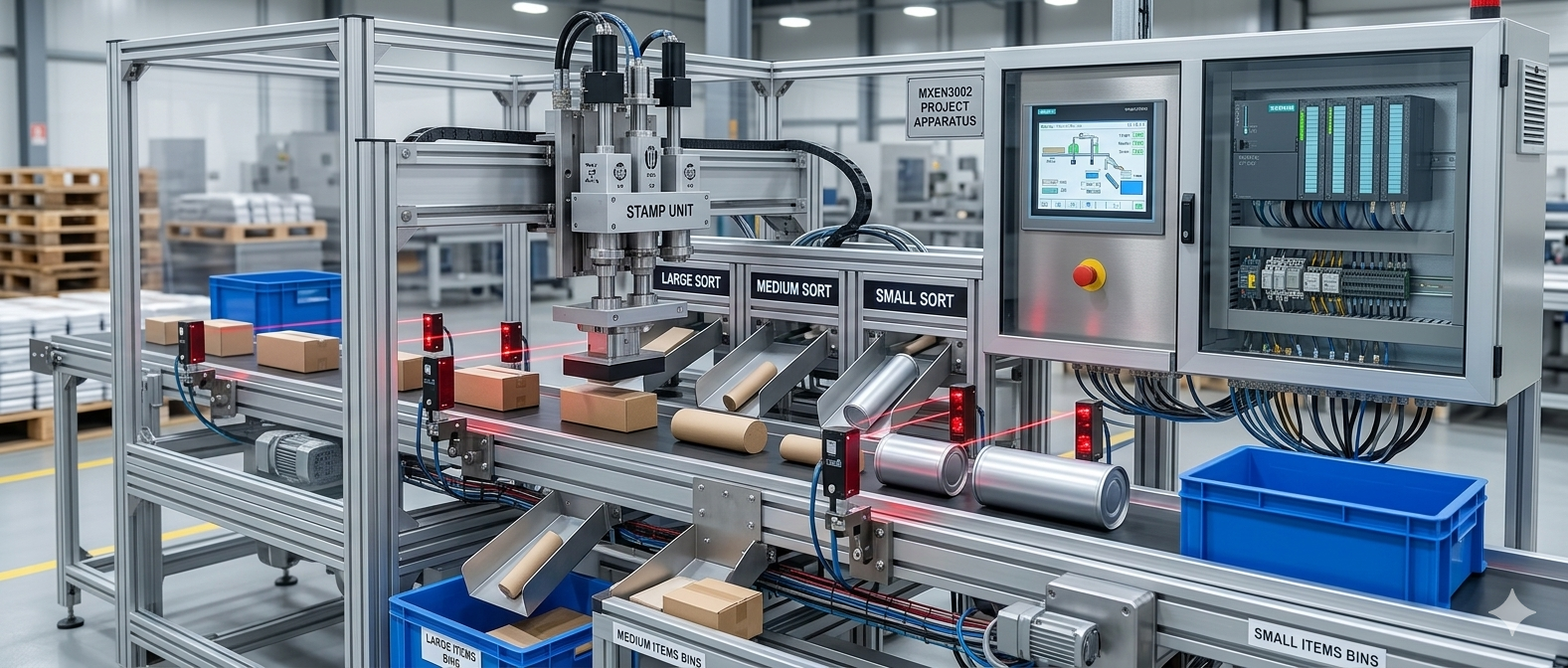
Automatic Stamping & Sorting Machine
SIMATIC S7-300 PLC Automation
Conveyor-based automated stamping and sorting system that categorises items into Large, Medium, and Small by measured length. Photo sensors detect items on the belt; actuators divert them to the correct output lane. Control logic runs on a SIMATIC S7-300 CPU using Ladder Diagram programming — precise timing coordination between stamp actuation and conveyor indexing was the key challenge. Built as a team project exploring how PLCs govern real industrial automation: deterministic cycle times, fail-safe sensor handling, and scalable logic structure.
or a system you want to build from scratch?